FIRST Tech Challenge · #30410 · Pasadena, CA
Axiomatic Moonwalkers

Moonwalkers
We build competition robots from first principles.
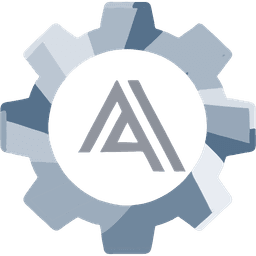
We build competition robots out of a home design lab in Pasadena. The garage is our machine shop, the living room is a full-size field, and we share what we build along the way.
DECODE Bot · 2025–26 season



Who we are
Built at home, shared with everyone
With no school shop, we turned home into a design lab. The garage became a machine shop and the living room a full-size FTC field. Most of our parts came secondhand from a team that was shutting down, which kept the whole thing on a student budget.
We're a small team and growing. We open-source our code and post the whole build on YouTube, the wins and the parts that break, so other teams can learn from what we figure out.
- Control Award
- 20k+ reached
- Open source
What we do
Built from first principles
One team, every discipline, designed, built, coded, and shared in the open.
 3D model
3D model01 · Design
Design
Every subsystem starts in CAD. The hooded shooter, turret, and intake are modeled in Fusion 360 and refined across versions before a single part is cut. (Interactive 3D coming soon.)
02 · Build
Build
Fabricated and iterated in a home design lab, printed parts swapped for metal, the shooter rewired, and the drivetrain hardened to survive competition. (Hover to flip through the build.)
package com.buddyram.rframe.ftc.v3;
import com.buddyram.rframe.Logger;
import com.buddyram.rframe.Odometry;
import com.buddyram.rframe.Pose3D;
import com.buddyram.rframe.RobotException;
import com.buddyram.rframe.Vector3D;
import com.buddyram.rframe.actions.RobotAction;
import com.buddyram.rframe.actions.TimeoutWrapperAction;
import com.buddyram.rframe.drive.HolonomicDriveInstruction;
import com.buddyram.rframe.drive.HolonomicDriveTrain;
import com.buddyram.rframe.drive.Navigatable;
import com.buddyram.rframe.ftc.DriveToAction;
import com.buddyram.rframe.ftc.v3.Robot.intake.Intake;
import com.buddyram.rframe.ftc.v3.Robot.launcher.Launcher;
public class NewDecodeBot implements Navigatable<HolonomicDriveTrain> {
public enum AutoStep { NEAR, MIDDLE, FAR, OPEN_GATE_LEFT, OPEN_GATE_BLOCK_AFTER_NEAR, SHOOT, INTAKE_GATE }
public static class AutoSequenceConfig {
public final Vector3D shootPos;
public final Vector3D firstShotPos;
public final double shootHeading;
public final AutoStep[] steps;
public final Vector3D parkPos;
public final int firstTurretWaitMs;
public final int turretWaitMs;
public AutoSequenceConfig(Vector3D firstShotPos, Vector3D shootPos, double shootHeading,
AutoStep[] steps, Vector3D parkPos,
int firstTurretWaitMs, int turretWaitMs) {
this.firstShotPos = firstShotPos;
this.shootPos = shootPos;
this.shootHeading = shootHeading;
this.steps = steps;
this.parkPos = parkPos;
this.firstTurretWaitMs = firstTurretWaitMs;
this.turretWaitMs = turretWaitMs;
}
public AutoSequenceConfig(Vector3D firstShotPos, Vector3D shootPos, double shootHeading,
AutoStep[] steps, Vector3D parkPos) {
this(firstShotPos, shootPos, shootHeading, steps, parkPos, 1000, 1000);
}
}
public boolean block = true;
public Logger logger;
public Odometry<Pose3D> odometry;
private static final Vector3D BLUE_GOAL = new Vector3D(0, 144, 0);
private static final Vector3D RED_GOAL = new Vector3D(144, 144, 0);
public boolean isRed;
public double turretOffset = 0;
public boolean jamFix = false;
public Odometry<Pose3D> getApriltagOdometry() {
return apriltagOdometry;
}
public Odometry<Pose3D> apriltagOdometry;
public HolonomicDriveTrain drive;
public Intake getIntake() {
return intake;
}
public Intake intake;
public boolean aimOn = false;
public Launcher getLauncher() {
return launcher;
}
public Launcher launcher;
public Vector3D targetGoal;
public NewDecodeBot() {
this(null, null, null, null, null, null, false);
}
public NewDecodeBot(Logger logger, Odometry<Pose3D> odometry, HolonomicDriveTrain drive, Launcher launcher, Intake intake, Odometry<Pose3D> apriltagOdometry, boolean isRed) {
this.init(logger, odometry, drive, launcher, intake, apriltagOdometry, isRed);
}
public void init(Logger logger, Odometry<Pose3D> odometry, HolonomicDriveTrain drive, Launcher launcher, Intake intake, Odometry<Pose3D> apriltagOdometry, boolean isRed) {
this.logger = logger;
this.odometry = odometry;
this.drive = drive;
this.launcher = launcher;
this.intake = intake;
this.apriltagOdometry = apriltagOdometry;
this.isRed = isRed;
this.targetGoal = isRed ? RED_GOAL : BLUE_GOAL;
}
@Override
public Odometry<Pose3D> getOdometry() {
return this.odometry;
}
@Override
public HolonomicDriveTrain getDrive() {
return this.drive;
}
@Override
public Logger getLogger() {
return this.logger;
}
@Override
public boolean isActive() {
return true;
}
public HolonomicDriveInstruction calculateRelativeDriveInstruction(Vector3D relativeTarget, double speed) {
return this.calculateDriveInstruction(relativeTarget.add(this.odometry.get().position), speed);
}
public class AdjustFlywheelSpeedAction implements RobotAction<NewDecodeBot> {
@Override
public boolean run(NewDecodeBot drive) throws RobotException {
drive.adjustFlywheelSpeed();
return true;
}
}
public int speed = 0;
public Double overrideHood = null;
public Double overrideDistance = null;
public double hoodOffset = 0;
public void adjustFlywheelSpeed() {
if (this.launcher == null) return;
double dist = overrideDistance == null ? this.odometry.get().position.distance(this.targetGoal) : overrideDistance;
this.getLauncher().wheel.setRPM(Math.max(2350.50621 * Math.pow(1.00529, dist) + speed, 0));
this.launcher.hood.setAngle(calculateHoodAngle(dist) + hoodOffset);
if (overrideHood != null) {
this.launcher.hood.setAngle(overrideHood);
}
}
public double calculateHoodAngle(double dist) {
return -0.000000109377 * Math.pow(dist, 3) + 0.0000691154 * Math.pow(dist, 2) - 0.0111601 * dist + 1.02966;
}
public Double overrideAngle = null;
/**
* Calculates the turret angle needed to hit the goal from a given position and heading.
* Use this to preload the turret during a drive so it's ready to shoot on arrival.
*/
public double calculateTurretAngle(Vector3D fromPosition, double heading) {
Vector3D posToGoal = this.targetGoal.sub(fromPosition);
double angle = (Math.toDegrees(Math.atan2(posToGoal.y, posToGoal.x)) - 90 - heading + turretOffset) % 360;
if (angle < 0) angle += 360;
angle = angle > 180 ? angle - 360 : angle;
return angle;
}
/**
* Preloads the turret angle for a future shooting position/heading.
* Sets overrideAngle so the turret starts moving immediately, even while driving.
*/
public void preloadTurretForPosition(Vector3D shootPosition, double shootHeading) {
this.aimOn = true;
this.overrideAngle = calculateTurretAngle(shootPosition, shootHeading);
}
/**
* Waits until the turret motor reaches its target position, with a timeout.
*/
public void waitForTurret(int timeoutMs) throws RobotException {
long start = System.currentTimeMillis();
while (!this.launcher.turret.isReady()) {
if (System.currentTimeMillis() - start > timeoutMs) {
System.out.println("[AUTO] waitForTurret timed out after " + timeoutMs + "ms");
break;
}
try { Thread.sleep(10); } catch (InterruptedException e) { throw new RuntimeException(e); }
}
}
/**
* Waits until the turret's actual angle is within the threshold of the
* live-calculated target angle (based on current robot position).
*/
public void waitUntilAimed(double thresholdDegrees, int timeoutMs) {
long start = System.currentTimeMillis();
while (System.currentTimeMillis() - start < timeoutMs) {
Pose3D pos = this.odometry.get();
double targetAngle = calculateTurretAngle(pos.position, pos.rotation.z);
double currentAngle = this.launcher.turret.getCurrentAngle();
double diff = targetAngle - currentAngle;
if (diff > 180) diff -= 360;
if (diff < -180) diff += 360;
if (Math.abs(diff) <= thresholdDegrees) {
return;
}
try { Thread.sleep(10); } catch (InterruptedException e) { throw new RuntimeException(e); }
}
System.out.println("[AUTO] waitUntilAimed timed out after " + timeoutMs + "ms");
}
public double autoAim() {
if (this.launcher == null) return 0;
Vector3D posToGoal = this.targetGoal.sub(this.odometry.get().position);
double angle = (Math.toDegrees(Math.atan2(posToGoal.y, posToGoal.x)) - 90 - this.odometry.get().rotation.z + turretOffset) % 360;
if (angle < 0) angle += 360;
angle = angle > 180 ? angle - 360 : angle;
if (overrideAngle != null) {
angle = overrideAngle;
}
if (!aimOn) {
angle = 0;
}
this.launcher.turret.setAngle(angle);
return angle;
}
public HolonomicDriveInstruction calculateDriveInstruction(Vector3D target, double speed) {
double rotationInstruction = 0, driveSpeedInstruction = 0, driveAngleInstruction = 0;
Pose3D pos = this.odometry.get();
driveSpeedInstruction = speed;
driveAngleInstruction = pos.position.calculateRotation(target).z;
return new HolonomicDriveInstruction(rotationInstruction, driveSpeedInstruction, driveAngleInstruction);
}
public void controlIntake() {
if (this.launcher == null || this.intake == null) return;
this.launcher.blocker.setAngle(this.block ? this.launcher.blocker.OPEN : this.launcher.blocker.CLOSED);
if (jamFix) {
this.intake.enableMode(Intake.Modes.INTAKING);
return;
}
else {
this.intake.enableMode(Intake.Modes.IDLE);
}
}
private void logPos(String label) {
Pose3D pos = this.odometry.get();
System.out.println("[AUTO] " + label + " pos=(" +
String.format("%.2f", pos.position.x) + ", " +
String.format("%.2f", pos.position.y) + ") heading=" +
String.format("%.2f", pos.rotation.z));
}
public void intakeFromGate() throws RobotException {
BotUtilsNew.driveAndRotateTo(new Vector3D(114, 60, 0), -90).run(this);
BotUtilsNew.driveAndRotateTo(new Vector3D(128, 57.92, 0), -60.49).run(this);
double time = System.currentTimeMillis();
jamFix = true;
BotUtilsNew.driveTowardsUntil(131, 58.56, (pos) -> System.currentTimeMillis() - time > 1100 , 0.3).run(this);
jamFix = false;
}
public void intakeWhileBlocking() throws RobotException {
BotUtilsNew.driveAndRotateTo(new Vector3D(126.7, 64.54, 0), 14.35).run(this);
double time = System.currentTimeMillis();
BotUtilsNew.driveTowardsUntil(128.68, 64.5, (pos) -> System.currentTimeMillis() - time > 300, 0.8).run(this);
BotUtilsNew.driveAndRotateTo(new Vector3D(130, 58, 0), 15.92).run(this);
}
public void intakeTick(double x, double y) throws RobotException {
jamFix = true;
BotUtilsNew.driveAndRotateTo(BotUtilsNew.mirrorIfRed(new Vector3D(45, y, 0), isRed), BotUtilsNew.mirrorIfRed(90, isRed)).run(this);
logPos("intakeTick approach (45," + y + ")@110");
new TimeoutWrapperAction<>(BotUtilsNew.driveTo(BotUtilsNew.mirrorIfRed(new Vector3D(x, y, 0), isRed), false), 1600).run(this);
logPos("intakeTick pickup (" + x + "," + y + ")@90");
}
public void intakeTickFar() throws RobotException {
intakeTick(18, 36);
}
public void intakeTickMiddle() throws RobotException {
intakeTick(15, 56);
}
public void intakeTickClose() throws RobotException {
new TimeoutWrapperAction<>(BotUtilsNew.driveAndRotateTo(BotUtilsNew.mirrorIfRed(new Vector3D(19, 84, 0), isRed), BotUtilsNew.mirrorIfRed(90, isRed)), 1600).run(this);
logPos("intakeTickClose (12,84)@90");
}
public void runStep(AutoStep step) throws RobotException {
switch (step) {
case NEAR: intakeTickClose(); break;
case MIDDLE: intakeTickMiddle(); break;
case FAR: intakeTickFar(); break;
case OPEN_GATE_LEFT: openGateLeft(); break;
case OPEN_GATE_BLOCK_AFTER_NEAR: intakeWhileBlocking();
case INTAKE_GATE: intakeFromGate();
}
}
private static final Vector3D SHOOT_POSITION = new Vector3D(50, 84, 0);
private static final int SHOOT_HEADING = 90;
public void shootImmediate(Vector3D shootPos, double shootHeading, int turretWaitMs) throws RobotException {
// Preload turret toward estimated shoot position so it's moving while we drive
preloadTurretForPosition(BotUtilsNew.mirrorIfRed(shootPos, isRed), BotUtilsNew.mirrorIfRed(shootHeading, isRed));
// Drive toward shoot position. Stops as soon as it enters a shooting zone.
Vector3D driveTarget = BotUtilsNew.mirrorIfRed(shootPos, isRed);
BotUtilsNew.driveTowardsUntil(driveTarget.x, driveTarget.y, (pos) -> DecodeGameMap.isInShootingZone(pos.position.x, pos.position.y, pos.rotation.z), 0.9).run(this);
this.getDrive().drive(new HolonomicDriveInstruction(0, 0, 0));
logPos("shootImmediate entered shooting zone");
// Use actual distance for hood/RPM so we don't overshoot at close range
this.overrideDistance = this.odometry.get().position.distance(this.targetGoal);
// Switch to live auto-aim and wait until turret is within 3 degrees of real target
overrideAngle = null;
waitUntilAimed(3, turretWaitMs);
// Shoot
this.jamFix = true;
this.block = false;
BotUtilsNew.wait(1300).run(this);
this.block = true;
}
public void shootFrom(Vector3D shootPos, double shootHeading, int turretWaitMs) throws RobotException {
// Turret should already be preloaded from prior step; drive to shooting position
this.aimOn = true;
BotUtilsNew.driveAndRotateTo(BotUtilsNew.mirrorIfRed(shootPos, isRed), BotUtilsNew.mirrorIfRed(shootHeading, isRed), 8).run(this);
logPos("shootFrom arrived (" + shootPos.x + "," + shootPos.y + ")@" + shootHeading);
// Switch to live auto-aim and wait for turret/flywheel to settle
overrideAngle = null;
waitForTurret(turretWaitMs);
// Shoot
this.jamFix = true;
this.block = false;
BotUtilsNew.wait(1300).run(this);
this.block = true;
}
public void shootClose() throws RobotException {
shootFrom(SHOOT_POSITION, SHOOT_HEADING, 1000);
}
public void openGateLeft() throws RobotException {
// Fast approach - just get close to alignment position
new DriveToAction<NewDecodeBot>(BotUtilsNew.mirrorIfRed(new Vector3D(30, 72, 0), isRed), 8, (dist) -> 0.8, false).run(this);
logPos("openGateLeft approach");
// Push with heading alignment, timeout prevents stalling
jamFix = false;
new TimeoutWrapperAction<>(BotUtilsNew.driveAndRotateTo(BotUtilsNew.mirrorIfRed(new Vector3D(9, 72, 0), isRed), BotUtilsNew.mirrorIfRed(90, isRed)), 500).run(this);
logPos("openGateLeft push");
BotUtilsNew.wait(800).run(this);
jamFix = true;
// Fast back away
new DriveToAction<NewDecodeBot>(BotUtilsNew.mirrorIfRed(new Vector3D(40, 60, 0), isRed), 8, (dist) -> 0.8, false).run(this);
}
public void updateGlobals() {
Globals.POSITION = this.odometry.get();
}
public void runAutoSequence(AutoSequenceConfig config) throws RobotException {
logPos("AUTO START");
if (this.launcher != null) {
this.overrideDistance = BotUtilsNew.mirrorIfRed(config.shootPos, isRed).distance(targetGoal);
// Preload turret toward first shot position so it's already aimed when we arrive
preloadTurretForPosition(BotUtilsNew.mirrorIfRed(config.firstShotPos, isRed), BotUtilsNew.mirrorIfRed(config.shootHeading, isRed));
}
boolean firstShot = true;
for (AutoStep step : config.steps) {
logPos("before " + step);
if (step == AutoStep.SHOOT) {
if (this.launcher == null) {
logPos("skipping SHOOT (no launcher)");
continue;
}
if (firstShot) {
shootFrom(config.firstShotPos, config.shootHeading,
config.firstTurretWaitMs);
} else {
shootImmediate(config.shootPos, config.shootHeading, config.turretWaitMs);
}
firstShot = false;
} else if (step == AutoStep.INTAKE_GATE || step == AutoStep.OPEN_GATE_BLOCK_AFTER_NEAR) {
if (this.intake == null) {
logPos("skipping " + step + " (no intake)");
continue;
}
runStep(step);
} else {
runStep(step);
}
logPos("after " + step);
}
// Park
BotUtilsNew.driveAndRotateTo(BotUtilsNew.mirrorIfRed(config.parkPos, isRed), 0).run(this);
logPos("after final park");
this.jamFix = false;
this.aimOn = false;
}
}03 · Code
Code
RFrame, a custom framework powering odometry, autonomous actions, and subsystems. A scratch-built pathing system scores 10–12 artifacts in autonomous.
 Outreach
Outreach04 · Share
Share
The @axiomatic-robotics channel has reached 20,000+ people across 50 countries, plus live demos, active FTC Discord help, and hands-on mentoring for other teams.