Our robots
Machines we've built
Every robot is a season's worth of design decisions. Here's the hardware, the subsystems, and the story behind each build.



DECODE Bot V2
The current build, rebuilt rigid for consistency, turret-aimed and autonomous-first.
After the 1/8" plywood base flexed and corrupted odometry, V2 moved to a 9-gauge aluminum base, dropped the indexer for faster intake cycles, and leaned on a scratch-built autonomous to maximize scoring speed. A hooded flywheel shooter pairs with a turret that tracks the goal continuously, flywheel RPM and hood angle adjust to the measured distance for every shot.
- Drivetrain
- Mecanum
- Shooter
- Hooded flywheel, distance-based RPM
- Turret
- Continuous vision tracking
- Localization
- OTOS (auto) + vision re-sync
- Software
- Java · RFrame (custom)
- Base
- 9-gauge aluminum
- Distance-based flywheel + hood aiming
- Turret tracks the goal continuously
- Autonomous scores 10–12 artifacts
- 9-gauge aluminum rebuild for rigidity


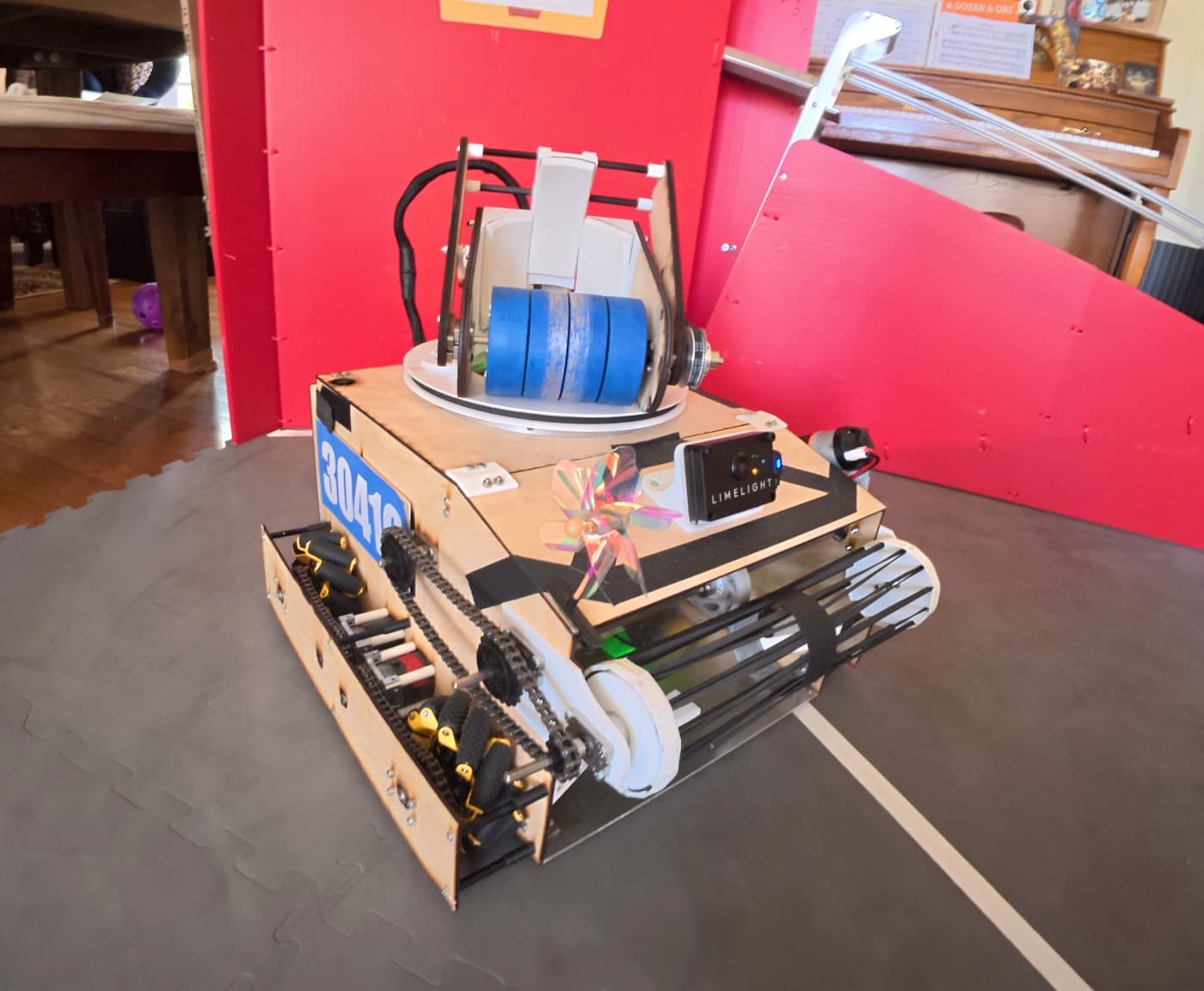
DECODE Bot V1
Added the turret and spindexer, and upgraded localization.
V1 introduced the turret and a spindexer to stage artifacts, and upgraded from a webcam to a Limelight vision system for much better AprilTag localization. Testing exposed how sensitive vision was to lighting, the lessons here drove the rigid, simplified V2.
- Drivetrain
- Mecanum
- Scoring
- Turret + spindexer
- Localization
- SparkFun OTOS + Limelight
- Software
- Java · RFrame
- First turret build
- Spindexer artifact staging
- Limelight AprilTag localization


DECODE Bot V0
The Meet 0 prototype, proving out the shooter and odometry.
The first prototype that hit the field at Meet 0. It paired a baseline SparkFun OTOS odometry sensor with a webcam and AprilTag detection for absolute position correction, establishing the shooter geometry and control loops that every later version built on.
- Drivetrain
- Mecanum
- Shooter
- Flywheel prototype
- Localization
- OTOS + webcam AprilTags
- Status
- Meet 0 prototype
- First robot on the field
- Baseline OTOS odometry
- Webcam AprilTag correction